Założenia algorytmu
Algorytm ma za zadanie identyfikację i segmentację krów oraz świń na materiałach wideo, co umożliwia szczegółową analizę ich zachowań oraz monitorowanie warunków ich życia. Kluczowe założenie algorytmu zakłada, że precyzyjna detekcja zwierząt na wideo pozwoli na lepsze zrozumienie ich potrzeb i potencjalnych zagrożeń dla ich zdrowia i dobrostanu.
Dzięki automatyzacji procesu analizy wideo, oczekuje się zwiększenia efektywności monitorowania dużych populacji zwierząt bez potrzeby ciągłej obserwacji przez personel.
Opis wytypowanego rozwiązania
Do realizacji tego zadania wybrano model YOLOv8, który jest jednym z najbardziej zaawansowanych narzędzi do detekcji obiektów w czasie rzeczywistym. Model ten charakteryzuje się wysoką dokładnością i szybkością przetwarzania, co jest kluczowe przy analizie dynamicznych scen w nagraniach wideo. YOLOv8, dzięki swojej architekturze, jest w stanie efektywnie identyfikować i śledzić zwierzęta na kolejnych klatkach wideo,
umożliwiając precyzyjne nakładanie na nie bounding boxów (prostokątnych ramek). Ta metoda wizualizacji pozwala na łatwą identyfikację i analizę zachowania poszczególnych
zwierząt.
Opis i podział zbioru danych wejściowych
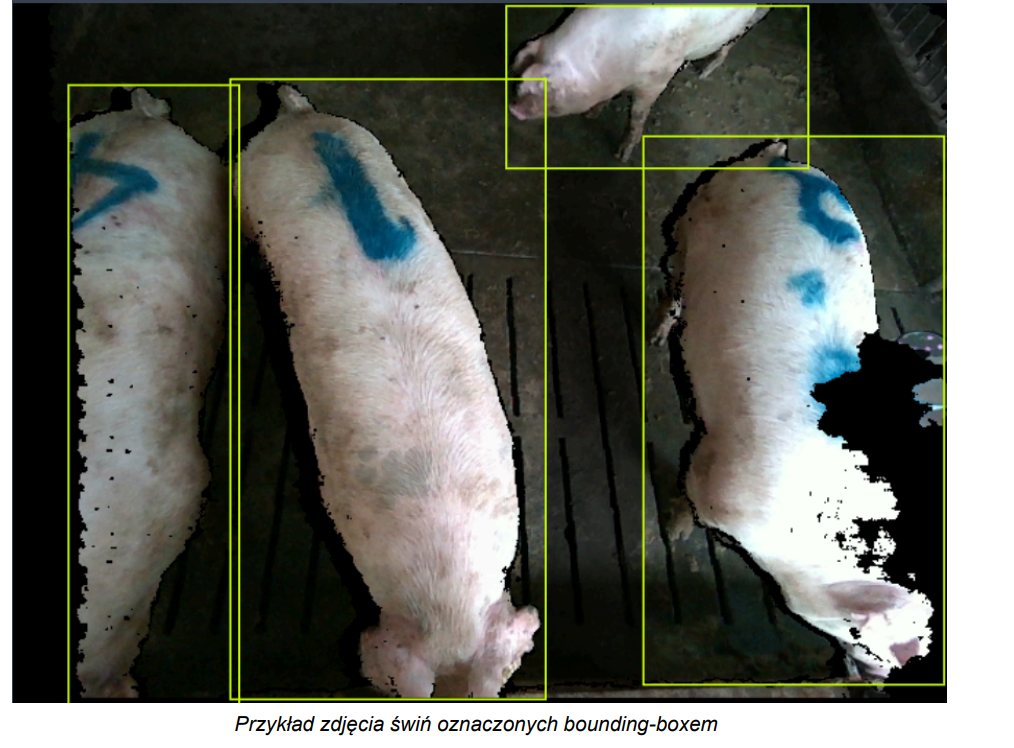
Do szkolenia modelu YOLOv8 wykorzystano zbiór danych złożony z precyzyjnie
oznakowanych zdjęć krów i świń, pozyskanych z platformy Roboflow. Zdjęcia te, reprezentujące różnorodne warunki środowiskowe, zostały dokładnie anotowane, co oznacza, że każde zwierzę na obrazie zostało otoczone bounding boxem, czyli prostokątną ramką wskazującą jego dokładną lokalizację. Takie podejście do oznaczania danych stanowi fundament dla efektywnego procesu nauki modelu, umożliwiając mu precyzyjne rozpoznawanie i segmentację zwierząt na podstawie
statycznych obrazów. Następnie tak wytrenowany model zostanie wykorzystany do analizy kolejnych klatek wideo poddawanego analizie
Zbiór danych podzielono na trzy główne części, aby zapewnić kompleksowe warunki dla nauki, walidacji i testowania modelu. Siedemdziesiąt procent danych przeznaczono jako zbiór treningowy, co stanowi podstawę do nauki rozpoznawania i segmentacji przez model. Kolejne dwadzieścia procent danych wykorzystano w fazie walidacji, której celem jest weryfikacja zdolności modelu do generalizacji na danych nieuczestniczących bezpośrednio w procesie treningowym. Ostatnie dziesięć procent danych skierowano na potrzeby końcowej oceny wydajności algorytmu, co umożliwia dokładną ocenę jego skuteczności w realistycznych warunkach. Ten podział zapewnia zrównoważone podejście do treningu modelu, maksymalizując
jego zdolność do dokładnego i efektywnego rozpoznawania zwierząt hodowlanych w materiałach wideo